Modul 4
Sistem Feeder Ikan Cerdas untuk Budidaya Air Tawar
1. Pendahuluan [Kembali]
Sektor perikanan, khususnya
budidaya ikan air tawar, memiliki peranan strategis dalam mendukung ketahanan
pangan nasional, menciptakan lapangan kerja, serta meningkatkan kesejahteraan
masyarakat. Di tengah meningkatnya permintaan akan hasil perikanan, efisiensi
dalam proses budidaya menjadi hal yang sangat krusial, terutama dalam hal
manajemen pakan. Pakan merupakan komponen biaya operasional terbesar dalam
budidaya ikan, sehingga ketepatan waktu dan jumlah pemberian pakan sangat
menentukan keberhasilan usaha.
Namun,
di lapangan, pembudidaya ikan skala kecil dan menengah masih banyak yang
melakukan proses pemberian pakan secara manual. Metode ini tidak hanya memakan
waktu dan tenaga, tetapi juga rentan terhadap ketidaktepatan takaran serta
waktu pemberian yang tidak konsisten. Akibatnya, sering terjadi pemborosan
pakan, pencemaran kualitas air kolam, serta pertumbuhan ikan yang tidak merata.
Solusi
berbasis teknologi seperti feeder otomatis berbasis Internet of Things (IoT)
memang telah tersedia di pasaran, namun umumnya masih mahal dan membutuhkan
koneksi internet yang stabil. Hal ini menjadi kendala tersendiri bagi
pembudidaya di daerah dengan keterbatasan infrastruktur digital.
Untuk
menjawab tantangan tersebut, diperlukan suatu inovasi teknologi tepat guna yang
efisien, ekonomis, serta mudah dioperasikan oleh petani ikan. Oleh karena itu,
dalam proposal ini diusulkan perancangan dan implementasi Sistem Feeder Ikan Cerdas untuk Budidaya Air Tawar berbasis Raspberry Pi Pico. Sistem ini dirancang
untuk memberikan pakan secara otomatis dengan mempertimbangkan faktor-faktor
seperti suhu lingkungan, jenis dan jumlah ikan, serta waktu pemberian pakan
yang terprogram.
Sebagai
pelengkap, alat ini juga dilengkapi fitur keamanan akses menggunakan RFID, pemantauan sisa pakan melalui sensor load cell, serta mekanisme
penyemburan pakan menggunakan motor dan blower. Dengan desain modular dan biaya
yang terjangkau, sistem ini diharapkan menjadi solusi praktis yang mendukung
produktivitas dan efisiensi budidaya ikan air tawar, khususnya bagi pembudidaya
skala kecil hingga menengah.
2. Tujuan [Kembali]
- Memahami
dan mengaplikasikan penggunaan mikrokontroler dan mikroprosesor,
khususnya Raspberry Pi Pico, dalam merancang sistem otomatis untuk bidang
perikanan.
- Menciptakan
prototipe alat pemberi pakan ikan otomatis yang
dapat bekerja secara cerdas dengan mempertimbangkan parameter-parameter
penting seperti waktu, suhu lingkungan, jenis ikan, dan jumlah ikan.
- Mengintegrasikan
berbagai komponen sensor dan aktuator, seperti
sensor suhu, load cell, RFID, motor, dan blower, dalam satu sistem terpadu
yang bekerja secara otomatis.
3. Alat dan Bahan [Kembali]
Raspberry Pi Pico

Sensor DHT22

Load Cell

RFID

Push Button

Motor Servo

Motor DC (untuk blower)

LCD 16x2

LED 5mm

Buzzer

Relay

Power Supply

PCB

RTC module

4. Dasar Teori [Kembali]
Komunikasi
1.1 Universal Asynchronous Receiver Transmitter (UART)
UART (Universal Asynchronous Receiver-Transmitter) adalah bagian perangkat keras komputer yang menerjemahkan antara bit-bit paralel data dan bit-bit serial. UART biasanya berupa sirkuit terintegrasi yang digunakan untuk komunikasi serial pada komputer atau port serial perangkat periperal.
Cara Kerja Komunikasi UART

Data dikirimkan secara paralel dari data bus ke UART1. Pada UART1 ditambahkan start bit, parity bit, dan stop bit kemudian dimuat dalam satu paket data. Paket data ditransmisikan secara serial dari Tx UART1 ke Rx UART2. UART2 mengkonversikan data dan menghapus bit tambahan, kemudia di transfer secara parallel ke data bus penerima.
1.2 Serial Peripheral Interface (SPI)
Serial Peripheral
Interface (SPI) merupakan salah satu mode komunikasi serial synchrounous
kecepatan tinggi yang dimiliki oleh ATmega 328. Komunikasi SPI membutuhkan 3
jalur yaitu MOSI, MISO, dan SCK. Melalui komunikasi ini data dapat saling
dikirimkan baik antara mikrokontroler maupun antara mikrokontroler dengan
peripheral lain di luar mikrokontroler.
- MOSI : Master Output Slave Input artinya jika dikonfigurasi sebagai master maka pin MOSI sebagai output tetapi jika dikonfigurasi sebagai slave maka pin MOSI sebagai input.
- MISO : Master Input Slave Output artinya jika dikonfigurasi sebagai master maka pin MISO sebagai input tetapi jika dikonfigurasi sebagai slave maka pin MISO sebagai output.
- SCLK : Clock jika dikonfigurasi sebagai master maka pin CLK berlaku sebagai output tetapi jika dikonfigurasi sebagai slave maka pin CLK berlaku sebagai input.
- SS/CS : Slave Select / Chip Select adalah jalur master memilih slave mana yang akan dikirimkan data.
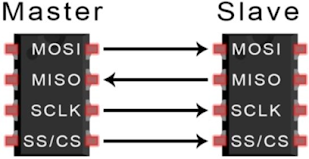
Cara Kerja Komunikasi SPI :
Sinyal clock dialirkan dari master ke slave
yang berfungsi untuk sinkronisasi. Master dapat memilih slave mana yang
akan dikirimkan data melalui slave select, kemudian data dikirimkan
dari master ke slave melalui MOSI. Jika master butuh respon data maka slave
akan mentransfer data ke master melalui MISO.
1.3 Inter Integrated Circuit (I2C)

Cara Kerja Komunikasi I2C :
Pada I2C, data ditransfer dalam bentuk message yang terdiri dari kondisi start, Address Frame, R/W bit, ACK/NACK bit, Data Frame 1, Data Frame 2, dan kondisi Stop.
- Kondisi start dimana saat pada SDA beralih dari logika high ke low sebelum SCL.
- Kondisi stop dimana saat pada SDA beralih dari logika low ke high sebelum SCL.
- R/W bit berfungsi untuk menentukan apakah master mengirim data ke slave atau meminta data dari slave. (logika 0 = mengirim data ke slave, logika 1 = meminta data dari slave)
- ACK/NACK bit berfungsi sebagai pemberi kabar jika data frame ataupun address frame telah diterima receiver.
2. ADC (Analog to
Digital Converter)
ADC atau Analog to Digital Converter merupakan salah
satu perangkat elektronika yang digunakan sebagai penghubung dalam pemrosesan
sinyal analog oleh sistem digital. Fungsi utama dari fitur ini adalah mengubah
sinyal masukan yang masih dalam bentuk sinyal analog menjadi sinyal digital
dengan bentuk kode-kode digital. Ada 2 faktor yang perlu diperhatikan pada
proses kerja ADC yaitu kecepatan sampling dan resolusi.
Kecepatan sampling menyatakan seberapa sering perangkat mampu mengkonversi sinyal analog ke dalam bentuk sinyal digital dalam selang waktu yang tertentu. Biasa dinyatakan dalam sample per second (SPS). Sementara Resolusi menyatakan tingkat ketelitian yang dimilliki. Pada Arduino, resolusi yang dimiliki adalah 10 bit atau rentang nilai digital antara 0 - 1023. Dan pada Arduino tegangan referensi yang digunakan adalah 5 volt, hal ini berarti ADC pada Arduino mampu menangani sinyal analog dengan tegangan 0 - 5 volt. Pada Arduino, menggunakan pin analog input yang diawali dengan kode A (A0- A5 pada Arduino Uno). Fungsi untuk mengambil data sinyal input analog menggunakan analogRead(pin).
3. Pulse
Width Modulation (PWM)
PWM (Pulse Width Modulation) adalah
teknik modulasi yang mengubah lebar pulsa (duty cycle) sementara amplitudo dan
frekuensi tetap konstan. Satu siklus pulsa terdiri dari kondisi high dan
transisi ke kondisi low. Lebar pulsa PWM sebanding dengan amplitudo sinyal asli
yang belum dimodulasi. Duty cycle adalah rasio antara waktu ON (lebar pulsa
High) dan periode total, biasanya dinyatakan dalam persentase (%).

duty cycle pwm
Keterangan :
t_ON =
waktu ON atau waktu dimana tegangan keluaran berada pada posisi tinggi (high
atau 1)
t_OFF =
waktu OFF atau waktu dimana tegangan keluaran berada pada posisi rendah (low
atau 0)
t_total = waktu satu siklus atau penjumlahan antara t_ON dengan t_OFF atau disebut juga dengan “periode satu gelombang”
Pada board Arduino Uno, pin yang dapat digunakan untuk
PWM adalah pin yang ditandai dengan tanda tilde (~), yaitu pin 3, 5, 6, 9, 10,
dan 11. Pin-pin ini dapat berfungsi sebagai input atau output analog. Untuk
menggunakan PWM pada pin tersebut, gunakan perintah analogWrite().
PWM pada Arduino beroperasi pada frekuensi 500Hz, yang berarti ada 500 siklus per detik. Setiap siklus dapat diberi nilai antara 0 hingga 255. Jika nilai 0 diberikan, pin tersebut akan selalu berada pada 0 volt. Jika nilai 255 diberikan, pin akan selalu berada pada 5 volt. Memberikan nilai 127 (setengah dari 255 atau 50%) akan membuat pin berada pada 5 volt selama setengah siklus dan 0 volt selama setengah siklus lainnya. Memberikan nilai 64 (25% dari 255) akan membuat pin berada pada 5 volt selama 1/4 siklus dan 0 volt selama 3/4 siklus, dan ini terjadi 500 kali dalam satu detik.
Raspberry Pi Pico

Parameter | Spesifikasi |
Microcontroller | RP2040 |
Operating Voltage | 3.3 V |
Input Voltage (recommended) | 5 V via USB |
Input Voltage (limit) | 1.8–5.5 V |
Digital I/O Pins | 26 GPIO pins |
PWM Digital I/O Pins | 16 |
Analog Input Pins | 3 |
DC Current per I/O Pin | 16 mA |
DC Current for 3.3V Pin | 300 mA |
Flash Memory | 2 MB on-board QSPI Flash |
SRAM | 264 KB |
Clock Speed | Hingga 133 MHz |

1 1. RAM (Random Access Memory)
Raspberry Pi Pico dilengkapi dengan 264KB SRAM on-chip. Kapasitas RAM yang lebih besar ini memungkinkan Pico menjalankan aplikasi yang lebih kompleks dan menyimpan data lebih banyak.
2. 2. Memori Flash Eksternal
Raspberry Pi Pico tidak memiliki ROM tradisional. Sebagai gantinya, ia menggunakan memori flash eksternal. Kapasitas memori flash ini dapat bervariasi, umumnya antara 2MB hingga 16MB, tergantung pada konfigurasi. Memori flash ini digunakan untuk menyimpan firmware dan program pengguna. Penggunaan memori flash eksternal pada Pico memberikan fleksibilitas lebih besar dalam hal kapasitas penyimpanan program.
3. Crystal Oscillator
Raspberry Pi Pico menggunakan crystal oscillator untuk menghasilkan sinyal clock yang stabil. Sinyal clock ini penting untuk mengatur kecepatan operasi mikrokontroler dan komponen lainnya.
4. Regulator Tegangan
Untuk memastikan pasokan tegangan yang stabil ke mikrokontroler.
5. Pin GPIO (General Purpose Input/Output):
Untuk menghubungkan Pico ke berbagai perangkat eksternal seperti sensor, motor, dan LED.
Sensor DHT22



Spesifikasi sensor suhu kelembaban DHT22 :
- Tegangan input : 3,3 – 6 VDC
- Sistem komunikasi : Serial (single – Wire Two way)
- Range suhu : -400C – 800C
- Range kelembaban : 0% – 100% RH
- Akurasi : ±20C (temperature) ±5% RH (humidity)
Untuk urusan kaki/pin, sensor suhu dan kelembaban DHT22 terdiri dari 4 kaki/pin, sama dengan DHT11, tetapi yang dipakai hanya 3 pin saja. Biasanya kalau kita membeli dalam bentuk modul jumlah pin-nya menjadi 3 :
- VCC(+) : tegangan input (5V)
- GND(-) : Ground
- Data : Data output serial
Load Cell


RFID
- Fungsi Dasar: Membaca dan mengidentifikasi kartu RFID
- Tegangan Operasi: 5V.
- Keluaran: Output SPI (Serial Peripheral Interface)
- Sensitivitas dan Durasi Baca: Dapat disesuaikan untuk kebutuhan aplikasi tertentu.
- Jarak Baca: Bergantung pada kondisi lingkungan dan jenis kartu RFID, namun umumnya dapat mencapai beberapa sentimeter hingga beberapa puluh sentimeter
- Waktu Inisialisasi: Tergantung pada sistem yang digunakan, biasanya butuh waktu kurang dari satu detik untuk inisialisasi
- Ukuran dan Berat: Ukuran dan berat yang mungkin bervariasi tergantung pada model atau produsen, namun umumnya cukup kecil dan ringan untuk integrasi dalam berbagai aplikasi.



Push Button
Motor Servo
Motor servo adalah sebuah perangkat atau aktuator putar (motor) yang dirancang dengan sistem kontrol umpan balik loop tertutup (servo), sehingga dapat di set-up atau di atur untuk menentukan dan memastikan posisi sudut dari poros output motor. motor servo merupakan perangkat yang terdiri dari motor DC, serangkaian gear, rangkaian kontrol dan potensiometer. Serangkaian gear yang melekat pada poros motor DC akan memperlambat putaran poros dan meningkatkan torsi motor servo, sedangkan potensiometer dengan perubahan resistansinya saat motor berputar berfungsi sebagai penentu batas posisi putaran poros motor servo.

Prinsip kerja motor servo yaitu motor servo dikendalikan dengan memberikan sinyal modulasi lebar pulsa (Pulse Wide Modulation / PWM) melalui kabel kontrol. Lebar pulsa sinyal kontrol yang diberikan akan menentukan posisi sudut putaran dari poros motor servo. Sebagai contoh, lebar pulsa dengan waktu 1,5 ms (mili detik) akan memutar poros motor servo ke posisi sudut 90⁰. Bila pulsa lebih pendek dari 1,5 ms maka akan berputar ke arah posisi 0⁰ atau ke kiri (berlawanan dengan arah jarum jam), sedangkan bila pulsa yang diberikan lebih lama dari 1,5 ms maka poros motor servo akan berputar ke arah posisi 180⁰ atau ke kanan (searah jarum jam). Lebih jelasnya perhatikan gambar dibawah ini.
Lebar pulsa kendali telah diberikan, maka poros motor servo akan bergerak atau berputar ke posisi yang telah diperintahkan, dan berhenti pada posisi tersebut dan akan tetap bertahan pada posisi tersebut. Jika ada kekuatan eksternal yang mencoba memutar atau mengubah posisi tersebut, maka motor servo akan mencoba menahan atau melawan dengan besarnya kekuatan torsi yang dimilikinya (rating torsi servo). Namun motor servo tidak akan mempertahankan posisinya untuk selamanya, sinyal lebar pulsa kendali harus diulang setiap 20 ms (mili detik) untuk menginstruksikan agar posisi poros motor servo tetap bertahan pada posisinya.
Motor DC (untuk blower)
Terdapat dua bagian utama pada sebuah Motor Listrik DC, yaitu Stator dan Rotor. Stator adalah bagian motor yang tidak berputar, bagian yang statis ini terdiri dari rangka dan kumparan medan. Sedangkan Rotor adalah bagian yang berputar, bagian Rotor ini terdiri dari kumparan Jangkar. Dua bagian utama ini dapat dibagi lagi menjadi beberapa komponen penting yaitu diantaranya adalah Yoke (kerangka magnet), Poles (kutub motor), Field winding (kumparan medan magnet), ArmatureWinding (Kumparan Jangkar), Commutator (Komutator)dan Brushes (kuas/sikat arang).
Pada prinsipnya motor listrik DC menggunakan fenomena elektromagnet untuk bergerak, ketika arus listrik diberikan ke kumparan, permukaan kumparan yang bersifat utara akan bergerak menghadap ke magnet yang berkutub selatan dan kumparan yang bersifat selatan akan bergerak menghadap ke utara magnet. Saat ini, karena kutub utara kumparan bertemu dengan kutub selatan magnet ataupun kutub selatan kumparan bertemu dengan kutub utara magnet maka akan terjadi saling tarik menarik yang menyebabkan pergerakan kumparan berhenti.

Untuk menggerakannya lagi, tepat pada saat kutub kumparan berhadapan dengan kutub magnet, arah arus pada kumparan dibalik. Dengan demikian, kutub utara kumparan akan berubah menjadi kutub selatan dan kutub selatannya akan berubah menjadi kutub utara. Pada saat perubahan kutub tersebut terjadi, kutub selatan kumparan akan berhadap dengan kutub selatan magnet dan kutub utara kumparan akan berhadapan dengan kutub utara magnet. Karena kutubnya sama, maka akan terjadi tolak menolak sehingga kumparan bergerak memutar hingga utara kumparan berhadapan dengan selatan magnet dan selatan kumparan berhadapan dengan utara magnet. Pada saat ini, arus yang mengalir ke kumparan dibalik lagi dan kumparan akan berputar lagi karena adanya perubahan kutub. Siklus ini akan berulang-ulang hingga arus listrik pada kumparan diputuskan.
Grafik respon motor DC :

LCD 16x2
LCD atau Liquid Crystal Display adalah suatu jenis media display (tampilan) yang menggunakan kristal cair (liquid crystal) untuk menghasilkan gambar yang terlihat. Teknologi Liquid Crystal Display (LCD) atau Penampil Kristal Cair sudah banyak digunakan pada produk-produk seperti layar Laptop, layar Ponsel, layar Kalkulator, layar Jam Digital, layar Multimeter, Monitor Komputer, Televisi, layar Game portabel, layar Thermometer Digital dan produk-produk elektronik lainnya.
Teknologi Display LCD ini memungkinkan produk-produk elektronik dibuat menjadi jauh lebih tipis jika dibanding dengan teknologi Tabung Sinar Katoda (Cathode Ray Tube atau CRT). Jika dibandingkan dengan teknologi CRT, LCD juga jauh lebih hemat dalam mengkonsumsi daya karena LCD bekerja berdasarkan prinsip pemblokiran cahaya sedangkan CRT berdasarkan prinsip pemancaran cahaya. Namun LCD membutuhkan lampu backlight (cahaya latar belakang) sebagai cahaya pendukung karena LCD sendiri tidak memancarkan cahaya. Beberapa jenis backlight yang umum digunakan untuk LCD diantaranya adalah backlight CCFL (Cold cathode fluorescent lamps) dan backlight LED (Light-emitting diodes).
LCD atau Liquid Crystal Display pada dasarnya terdiri dari dua bagian utama yaitu bagian Backlight (Lampu Latar Belakang) dan bagian Liquid Crystal (Kristal Cair). Seperti yang disebutkan sebelumnya, LCD tidak memancarkan pencahayaan apapun, LCD hanya merefleksikan dan mentransmisikan cahaya yang melewatinya. Oleh karena itu, LCD memerlukan Backlight atau Cahaya latar belakang untuk sumber cahayanya. Cahaya Backlight tersebut pada umumnya adalah berwarna putih. Sedangkan Kristal Cair (Liquid Crystal) sendiri adalah cairan organik yang berada diantara dua lembar kaca yang memiliki permukaan transparan yang konduktif.
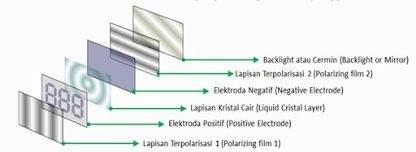
Bagian-bagian LCD atau Liquid Crystal Display diantaranya adalah:
- Lapisan Terpolarisasi 1 (Polarizing Film 1)
- Elektroda Positif (Positive Electrode)
- Lapisan Kristal Cair (Liquid Cristal Layer)
- Elektroda Negatif (Negative Electrode)
- Lapisan Terpolarisasi 2 (Polarizing film 2)
- Backlight atau Cermin (Backlight or Mirror)
Dibawah ini adalah gambar struktur dasar sebuah LCD:
LCD yang
digunakan pada Kalkulator dan Jam Tangan digital pada umumnya menggunakan
Cermin untuk memantulkan cahaya alami agar dapat menghasilkan digit yang
terlihat di layar. Sedangkan LCD yang lebih modern dan berkekuatan tinggi
seperti TV, Laptop dan Ponsel Pintar menggunakan lampu Backlight (Lampu Latar
Belakang) untuk menerangi piksel kristal cair. Lampu Backlight tersebut pada
umumnya berbentuk persegi panjang atau strip lampu Flourescent atau Light
Emitting Diode (LED). Cahaya putih adalah cahaya terdiri dari ratusan cahaya
warna yang berbeda. Ratusan warna cahaya tersebut akan terlihat apabila cahaya
putih mengalami refleksi atau perubahan arah sinar. Artinya, jika beda sudut
refleksi maka berbeda pula warna cahaya yang dihasilkan.
Backlight LCD
yang berwarna putih akan memberikan pencahayaan pada Kristal Cair atau Liquid
Crystal. Kristal cair tersebut akan menyaring backlight yang diterimanya dan
merefleksikannya sesuai dengan sudut yang diinginkan sehingga menghasilkan
warna yang dibutuhkan. Sudut Kristal Cair akan berubah apabila diberikan
tegangan dengan nilai tertentu. Karena dengan perubahan sudut dan penyaringan
cahaya backlight pada kristal cair tersebut, cahaya backlight yang sebelumnya
adalah berwarna putih dapat berubah menjadi berbagai warna.
Jika ingin
menghasilkan warna putih, maka kristal cair akan dibuka selebar-lebarnya
sehingga cahaya backlight yang berwarna putih dapat ditampilkan sepenuhnya.
Sebaliknya, apabila ingin menampilkan warna hitam, maka kristal cair harus
ditutup serapat-rapatnya sehingga tidak adalah cahaya backlight yang dapat
menembus. Dan apabila menginginkan warna lainnya, maka diperlukan pengaturan
sudut refleksi kristal cair yang bersangkutan
LED 5mm
Spesifikasi :

Buzzer
Buzzer adalah sebuah komponen elektronika yang berfungsi untuk mengubah getaran listrik menjadi getaran suara. Pada dasarnya prinsip kerja buzzer hampir sama dengan loud speaker, jadi buzzer juga terdiri dari kumparan yang terpasang pada diafragma dan kemudian kumparan tersebut dialiri arus sehingga menjadi elektromagnet, kumparan tadi akan tertarik ke dalam atau keluar, tergantung dari arah arus dan polaritas magnetnya, karena kumparan dipasang pada diafragma maka setiap gerakan kumparan akan menggerakkan diafragma secara bolak-balik sehingga membuat udara bergetar yang akan menghasilkan suara.
Relay
Single-Channel Relay Module Specifications
- Supply voltage – 3.75V to 6V
- Quiescent current: 2mA
- Current when the relay is active: ~70mA
- Relay maximum contact voltage – 250VAC or 30VDC
- Relay maximum current – 10A
Power Supply
Specifications:
- Input Voltage: 100 – 220VAC 50/60Hz
- Output Type – DC
- Output Voltage: 12VDC
- Output Current: 5A
- Total Power: 60 W
- Protections: Overload / Over Voltage / Short Circuit
- Auto-Recovery After Protection
- Universal AC input / Full range
- Cooling by Free Air Convection
- LED power supply with a metal body for hidden installation for LED lighting
- Compact Size Light Weight.
- High Efficiency, Reliability & low energy consumption
- Shell Material: Metal Case / Aluminum Base
- Color: Silver
- Dimensions: 130mm x 98mm x 40mm
PCB
RTC module
DS3231 RTC MODULE Specifications
- Operating voltage of DS3231 MODULE: 2.3V – 5.5V
- Can operate on LOW voltages
- Consumes 500nA on battery backup
- Maximum voltage at SDA , SCL : VCC + 0.3V
- Operating temperature: -45ºC to +80ºC
5. Percobaan [Kembali]
Flowchart dan Listing Program
Pi Pico 1

Pi Pico 2

Rangkaian Simulasi

Prosedur Kerja
- Di LCD akan tampil tulisan silahkan tempelkan ID Card
- Login Menggunakan Id card yang akan ditempelkan ke RFID.
- Ketika login tidak berhasil maka kembali ke menu login.
- Ketika Login berhasil, maka akan masuk ke menu Pilihan "Pilih Ikan", "Cek sisa", "Cek Suhu", "Tes Alat".
- Menu Pilih Ikan , Ketika ditekan maka akan menampilkan pilihan ikan yaitu Nila, Gurame, Mas dan Lele. Ketika jenis ikan telah dipilih maka akan muncul Pilihan jumlah ikan dari 10 hingga 100. Setelah dipilih maka akan muncul Frekuensi makan yaitu 2 atau 3 kali tergantung suhu yang telah ditetapkan di program. Maka nanti Ketika jam nya tiba motor servo akan melepaskan pelet ikan sesuai dengan jumlah ikan dan jenis ikan yang telah diatur di program, setelah itu akan ditembakkan oleh blower ke kolam ikan, yang mana arah tembakan diatur oleh 2 servo horizontal dan vertikal dibawah blower. Setelah itu akan terbentuk jadwal otomatis.
- Menu Cek sisa , ketika ditekan maka LCD akan menampilkan pakan yang ada, yang dibaca oleh load cell.
- Menu Cek suhu, ketika ditekan maka akan menampilkan suhu saat ini yang dibaca oleh dht22 yang akan ditampilkan di LCD.
- Menu Test Alat, Ketika ditekan maka motor servo pakan akan melepaskan pakan 10g dan buzzer akan berbunyi yang menandakan bahwa alat berfungsi dengan baik.
Video Simulasi
No comments:
Post a Comment